Hardware-Spezifikation¶
Bemerkung
Die folgenden Hardware-Spezifikationen dienen als allgemeine Referenz; es können Unterschiede zum Produkt bestehen.
Umfang der Lieferung¶
Die Standardlieferung für die rc_viscore Stereokamera umfasst
- rc_viscore Stereokamera,
- Kalibriermuster groß (A3),
- 2 x 10 m Gigabit-Ethernet-Netzwerkkabel,
- 10 m Stromkabel mit M12-Stecker und einem offenen Ende,
- Kurzanleitung.
Das vollständige Handbuch ist online in digitaler Form unter https://doc.rc-viscore.com verfügbar.
Bemerkung
Die folgenden Artikel sind nicht im Lieferumfang enthalten, sofern nicht anders angegeben:
- Kupplungen, Adapter, Halterungen,
- Stromversorgungseinheit und Sicherungen.
Vorschläge für Kabel finden Sie unter Zubehör.
Das folgende Bild zeigt die wichtigsten Bauteile der rc_viscore Stereokamera, auf die in diesem Handbuch Bezug genommen wird.
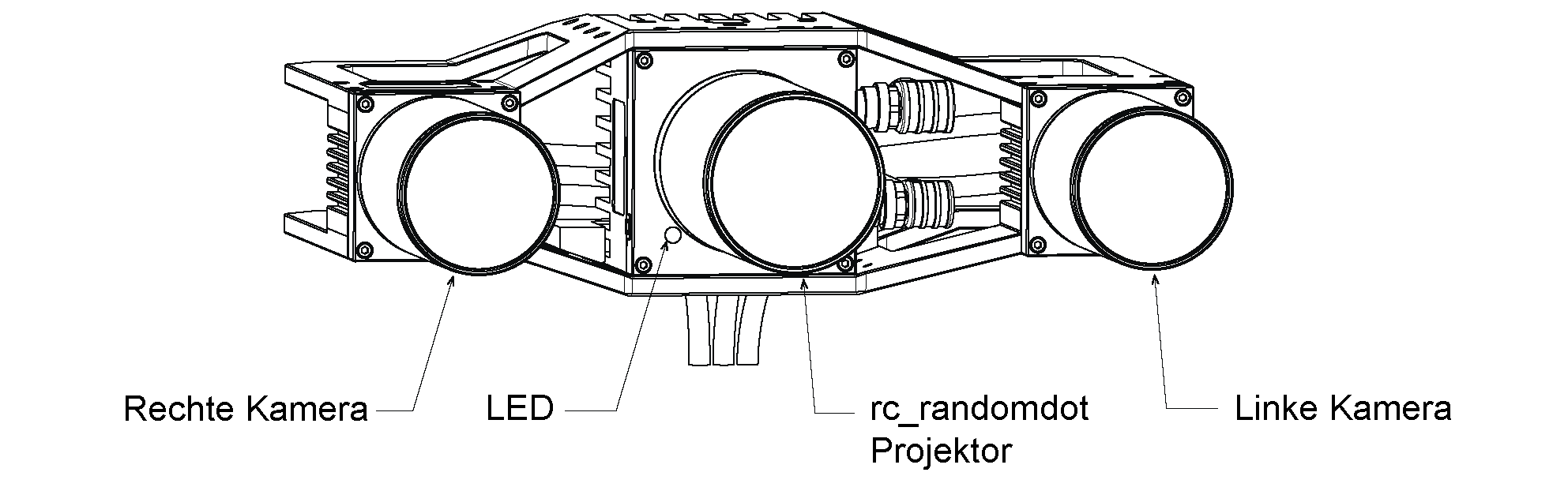
Abb. 2 Beschreibung der Bauteile
Technische Spezifikation¶
Die technische Spezifikation der rc_viscore Stereokamera ist in Tab. 1 dargestellt. Die angegebene Tiefenbildrate kann auf einem rc_cube oder mit dem SGM®Producer auf einem Computer mit einer Nvidia RTX2070 GPU erreicht werden. Höhere Bildraten (bis zu 9 Hz) sind mit schnelleren Grafikkarten möglich.
| rc_viscore Stereokamera | |
|---|---|
| Bildauflösung | 4112 x 3008 Pixel monochrom |
| Bildwiederholrate | 9 Hz |
| Brennweite | 16 mm |
| Sichtfeld | Horizontal: 47,5°, Vertikal: 35,7° |
| Arbeitsbereich | 670 mm x 640 mm @ 1.0 m Abstand
1550 mm x 1280 mm @ 2.0 m Abstand
2430 mm x 1920 mm @ 3.0 m Abstand
3310 mm x 2560 mm @ 4.0 m Abstand
|
| Tiefenbild | 4112 x 3008 Pixel (Voll) @ 2,8 Hz (Nvidia RTX2070)
2056 x 1504 Pixel (Hoch) @ 4,6 Hz (Nvidia RTX2070)
1028 x 752 Pixel (Mittel) @ 9 Hz (Nvidia RTX2070)
686 x 502 Pixel (Niedrig) @ 9 Hz (Nvidia RTX2070)
|
| Kühlung | Passiv |
| Basisabstand | 210 mm |
| Größe (B x H x L) | 262 mm x 204 mm x 82 mm |
| Masse | 1.64 kg |
Der Tiefenbildbereich der rc_viscore Stereokamera hängt von der Tiefenbildqualität, dem angegebenen maximalen Tiefenbereich und dem verfügbaren GPU-Speicher ab. Der Tiefenbereich bei näherer Entfernung ist viel kleiner als der Tiefenbereich bei weiter Entfernung. Der rc_cube verwendet 3,4 Gbyte GPU-Speicher für das Stereo-Matching. Tab. 2 zeigt Beispiele für resultierende Tiefenbereiche mit 3,4 Gbyte GPU-Speicher. Größere Tiefenbereiche sind möglich, wenn der SGM®Producer mit einer Grafikkarte verwendet wird, die mehr GPU-Speicher bietet.
| rc_viscore Stereokamera | |
|---|---|
| Volle Tiefenbildqualität | 0.89 m bis 1.00 m
1.60 m bis 2.00 m
2.18 m bis 3.00 m
2.65 m bis 4.00 m
|
| Hohe Tiefenbildqualität | 0.52 m bis 1.00 m
0.66 m bis 2.00 m
0.75 m bis 3.00 m
0.80 m bis 4.00 m
1,00 m bis unendlich
|
| Mittlere und niedrige Tiefenbildqualität | 0.52 m bis unendlich |
Die Auflösung und Genauigkeit bei verschiedenen Entfernungen ist in Tab. 3 für die empfohlene Tiefenbildqualität Hoch angegeben. Bei voller Tiefenbildqualität sind die Auflösung und die Genauigkeit um den Faktor 2 besser. Bei mittlerer Qualität sind die Auflösung und die Genauigkeit etwa zweimal schlechter als in der Tabelle angegeben.
| Abstand | rc_viscore Stereokamera | |
|---|---|---|
| Laterale Auflösung | 1.0 m
2.0 m
3.0 m
4.0 m
|
0.4 mm
0.9 mm
1.3 mm
1.7 mm
|
| Tiefenauflösung | 1.0 m
2.0 m
3.0 m
4.0 m
|
0.1 mm
0.5 mm
1.2 mm
2.0 mm
|
| Durchschnittliche Tiefengenauigkeit | 1.0 m
2.0 m
3.0 m
4.0 m
|
0.5 mm
2.0 mm
4.6 mm
8.2 mm
|
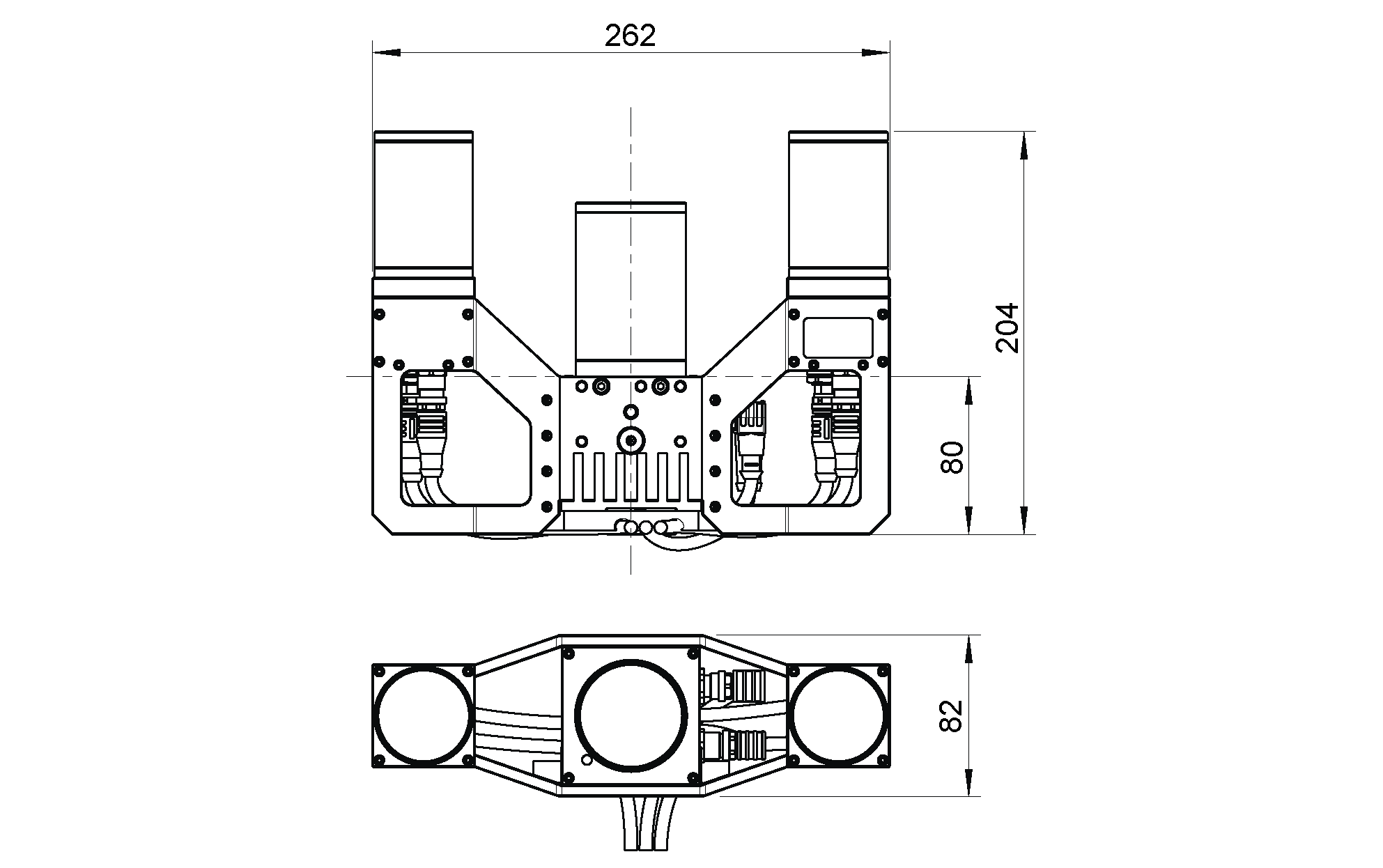
Abb. 3 Gesamtabmessungen der rc_viscore Stereokamera in Millimetern
CAD-Modelle der rc_viscore Stereokamera können von https://www.roboception.com/download heruntergeladen werden. Die CAD-Modelle werden ohne Gewähr für ihre Korrektheit zur Verfügung gestellt.
Umwelt- und Betriebsbedingungen¶
Die rc_viscore Stereokamera ist für den industriellen Einsatz konzipiert. Die Umgebungsbedingungen für Lagerung, Transport und Betrieb in Tab. 4 müssen beachtet werden.
| rc_viscore Stereokamera | |
|---|---|
| Lager-/Transporttemperatur | -20 °C bis 60 °C |
| Betriebstemperatur | 0 °C bis 45 °C (passive Kühlung) |
| Relative Luftfeuchtigkeit (nicht kondensierend) | 20 % to 80 % |
| Schutzklasse | IP54 |
| Sonstige |
|
Die rc_viscore Stereokamera ist für eine Betriebstemperatur (Umgebung) von 0 °C bis 45 °C ausgelegt und arbeitet mit einer konvektiven (passiven) Kühlung. Ein ungehinderter Luftstrom, insbesondere um die Kühlrippen, muss während des Einsatzes gewährleistet sein. Die rc_viscore Stereokamera darf nur über die beschriebene mechanische Montageschnittstelle montiert werden, wobei alle Gehäuseteile unbedeckt bleiben müssen. Ein Freiraum von mindestens 10 cm in alle Richtungen vom Gehäuse und ein ausreichender Luftaustausch mit der Umgebung sind erforderlich, um eine ausreichende Kühlung zu gewährleisten. Die Kühlrippen müssen frei von Schmutz und anderen Verunreinigungen sein.
Spezifikationen für die Spannungsversorgung¶
Die rc_viscore Stereokamera muss von einer Gleichspannungsquelle versorgt werden. Im Standardlieferumfang der Kamera ist kein Gleichspannungsnetzteil enthalten. Jede rc_viscore Stereokamera muss an eine eigene Spannungsversorgung angeschlossen werden. Der Anschluss an das Stromnetz ist nur über eine nach EN55011 Klasse B zertifizierte Stromversorgung zulässig.
| Min | Nominal | Max | |
|---|---|---|---|
| Versorgungsspannung | 22.0 V | 24 V | 26.0 V |
| Max. Leistungsaufnahme | 48 W | ||
| Überstromschutz | Die Stromversorgung muss mit einer 2-A-Sicherung abgesichert sein | ||
| Erfüllung der EMV-Anforderungen | siehe Elektronische und Sicherheitsstandards | ||
Warnung
Die Überschreitung der maximalen Betriebsspannung kann zu Schäden an der rc_viscore Stereokamera, am Netzteil und an angeschlossener Ausrüstung führen.
Warnung
Jede rc_viscore Stereokamera muss von einem eigenen Netzteil versorgt werden.
Warnung
Der Anschluss an das Gebäudenetz darf nur über Netzteile erfolgen, die gemäß EN 55011 als Gerät der Klasse B zertifiziert sind.
Verkabelung¶
Die rc_viscore Stereokamera wird mit einem bereits angeschlossenen Synchronisationskabel zwischen Projektor und Kameras geliefert. Es liegt in der Verantwortung des Kunden, die beiden mitgelieferten M12 X-kodierten Netzwerkkabel an die linke und rechte Kamera sowie das Netzkabel mit einem abgewinkelten M12-Stecker an den Projektor anzuschließen (siehe Abb. 4). Die Netzwerkkabel müssen zur Zugentlastung in die Kabelführung eingeklipst werden. Alle Kabel müssen an der Montagehalterung befestigt werden.
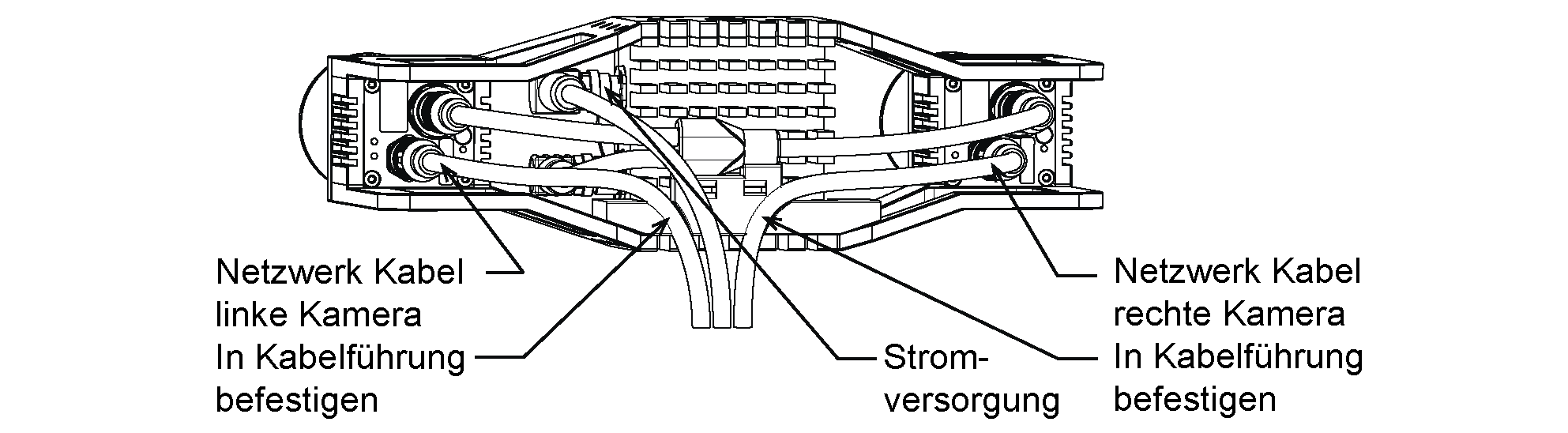
Abb. 4 Lage der elektrischen Anschlüsse der rc_viscore Stereokamera
Warnung
Aufgrund des Spannungsabfalls ist die maximale Länge des Netzkabels auf 15 m begrenzt. Die Versorgungsspannung sollte auf die angegebenen 24 V eingestellt werden und darf wegen der stark schwankenden Stromaufnahme der rc_viscore Stereokamera nicht über 26 V liegen.
Warnung
Die Richtlinien zum Kabelmanagement sind zwingend einzuhalten. Kabel sind immer mit einer Zugentlastung an der Halterung der rc_viscore Stereokamera zu befestigen, sodass durch Kabelbewegungen keine Kräfte auf die M12-Anschlüsse der Kamera wirken. Die verwendeten Kabel müssen lang genug sein, damit sich die Kamera voll bewegen kann, ohne dass das Kabel zu stark belastet wird. Der minimale Biegeradius des Kabels (d.h. \(R_{min} = 15 d\)) muss eingehalten werden.
Die Steckerbelegung für den Stromanschluss ist in Tab. 6 angegeben.
| Pin | Kabelfarbe | Bezeichnung | Details |
|---|---|---|---|
| 1 | Weiß | nc | |
| 2 | Braun | Leistung +24 V | 2 A @ 24 V |
| 3 | Grün | GPIO In 1 | 12-24 V, 15 mA max. |
| 4 | Gelb | GPIO GND | |
| 5 | Grau | GPIO Vcc | 5-24 V, 50 mA max. |
| 6 | Pink | GPIO Out 1 | Projektor Belichtungssignal |
| 7 | Blau | Leistung GND | |
| 8 | Rot | GPIO Out 2 |
Bemerkung
Bitte beachten Sie, dass in den Hardwarerevisionen vor 1.1 die Pins Nummer 3 und 4 nicht verbunden waren.
Die GPIOs sind durch Optokoppler galvanisch getrennt. GPIO Out 1 liefert standardmäßig ein Belichtungssynchronisationssignal mit einem logischen High-Pegel für die Dauer der Bildbelichtung. Die Pins der nicht verwendeten GPIOs sollten potentialfrei bleiben. GPIO-Schaltkreise und Spezifikationen sind in Abb. 5 dargestellt.
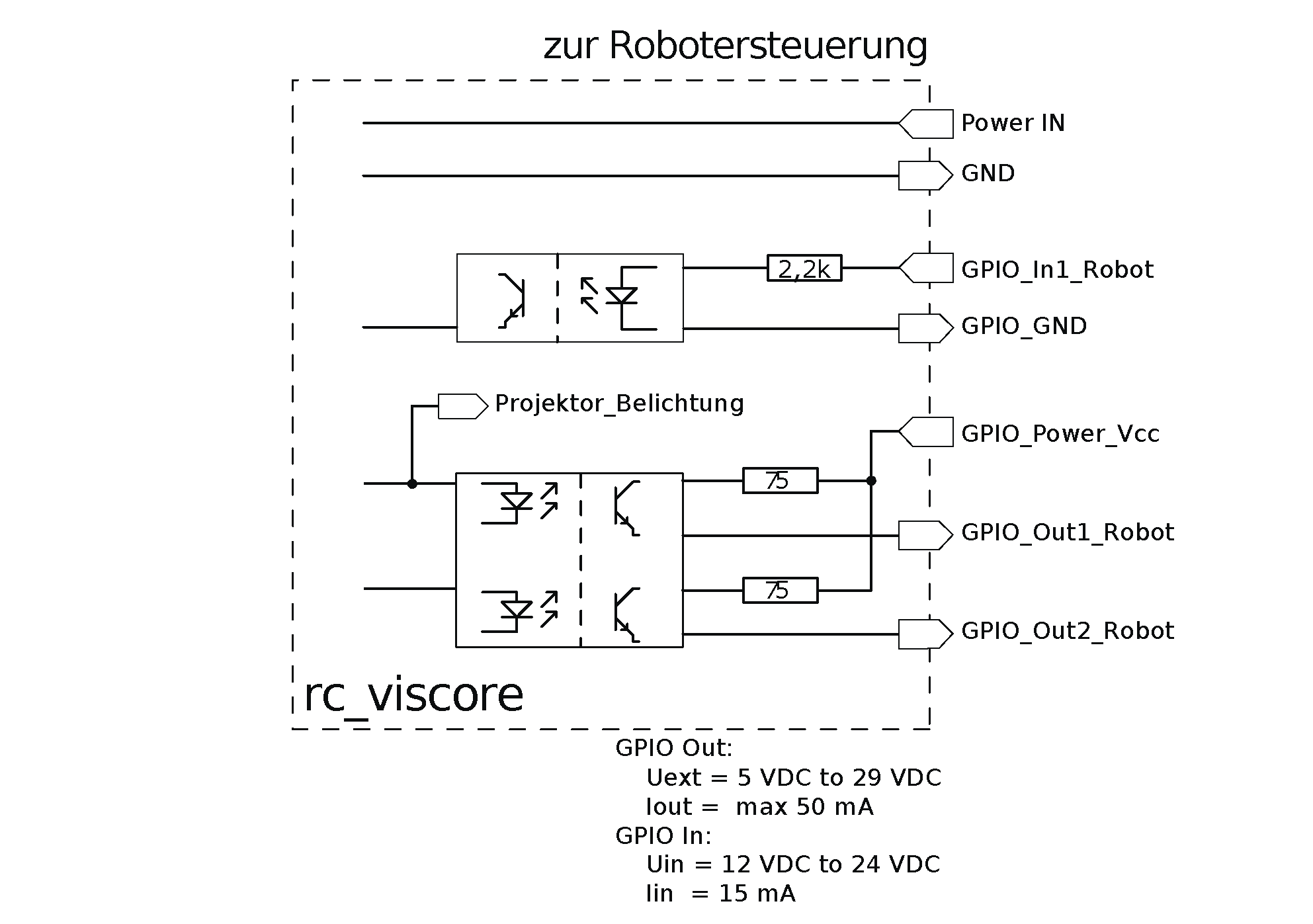
Abb. 5 GPIO-Schaltschema und zugehörige Spezifikationen
Koordinatensysteme¶
Der Ursprung des Koordinatensystems der rc_viscore Stereokamera ist definiert als die Austrittspupille des linken Kameraobjektivs. Dieses Koordinatensystem wird Kamera-Koordinatensystem genannt. Es wird in Abb. 6 dargestellt.
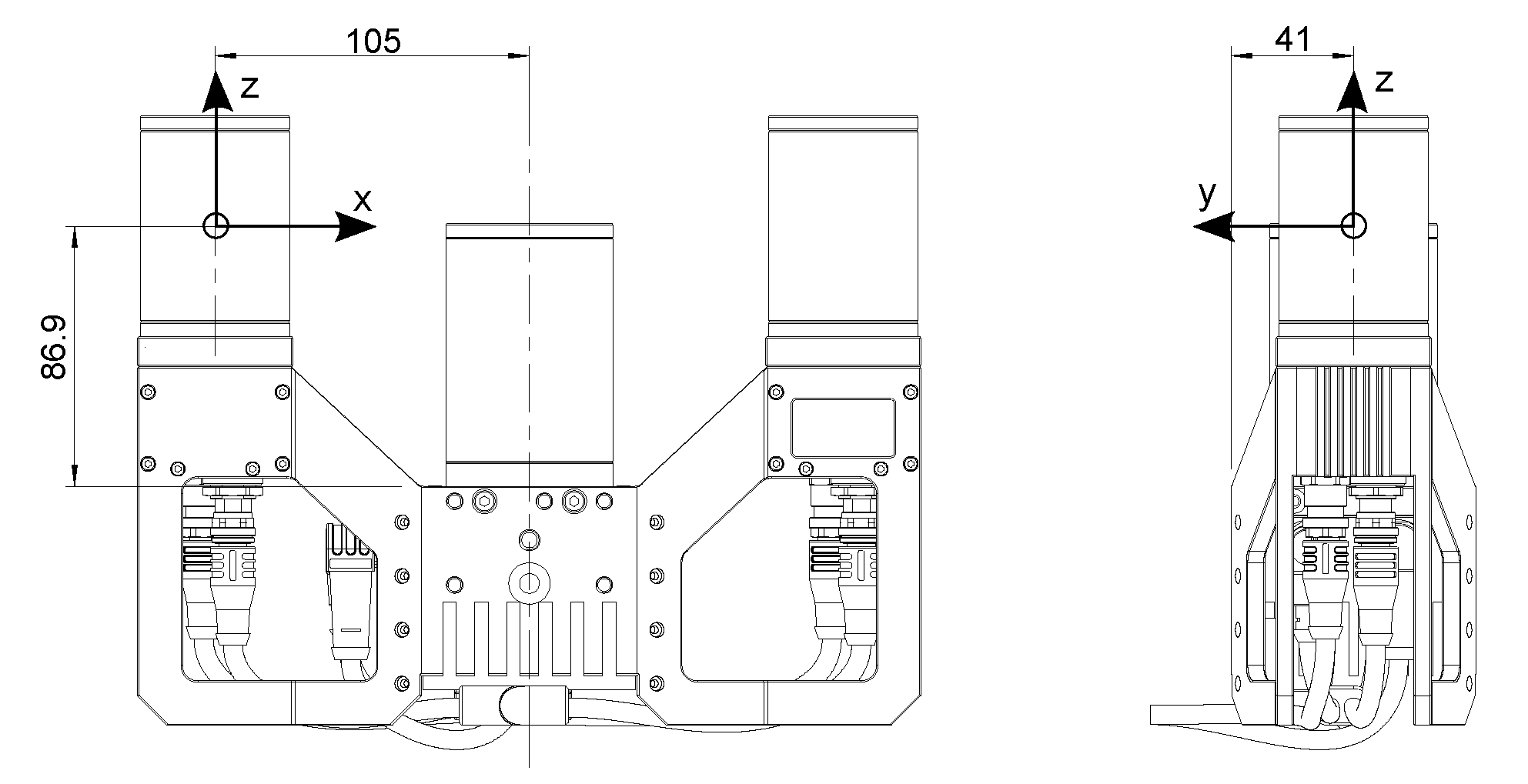
Abb. 6 Position und Orientierung des Kamerakoordinatensystems
Bemerkung
Der korrekte Versatz zwischen dem Kamera-Koordinatensystem und einem Roboterkoordinatensystem kann durch Hand-Augen-Kalibrierung kalibriert werden. Siehe https://doc.rc-cube.com/latest/en/handeye_calibration.html.