Installation¶
Warnung
Die Anweisungen zur rc_viscore Stereokamera im Abschnitt Sicherheit müssen vor der Installation gelesen und verstanden werden.
Montage¶
Die rc_viscore Stereokamera ist für die Montage an einer Wand oder Decke über dem Zielbereich vorgesehen. Sie ist nicht für den Einsatz in dynamischen Anwendungen an einem Roboterhandgelenk vorgesehen. Es liegt in der Verantwortung des Kunden, für eine geeignete Halterung zu sorgen.
Für die Montage bietet die rc_viscore Stereokamera auf seiner Ober- und Unterseite mehrere M4- und M5-Gewinde an (siehe Abb. 7). Zum Schutz vor Vibrationen müssen mittelfeste Schraubensicherungen oder Tuflok-Schrauben verwendet werden. M5-Schrauben müssen mit 4,0 Nm angezogen werden, M4-Schrauben müssen mit 3,3 Nm angezogen werden.
Warnung
Die rc_viscore Stereokamera kann nicht an den Endeffektor eines Roboters montiert werden.
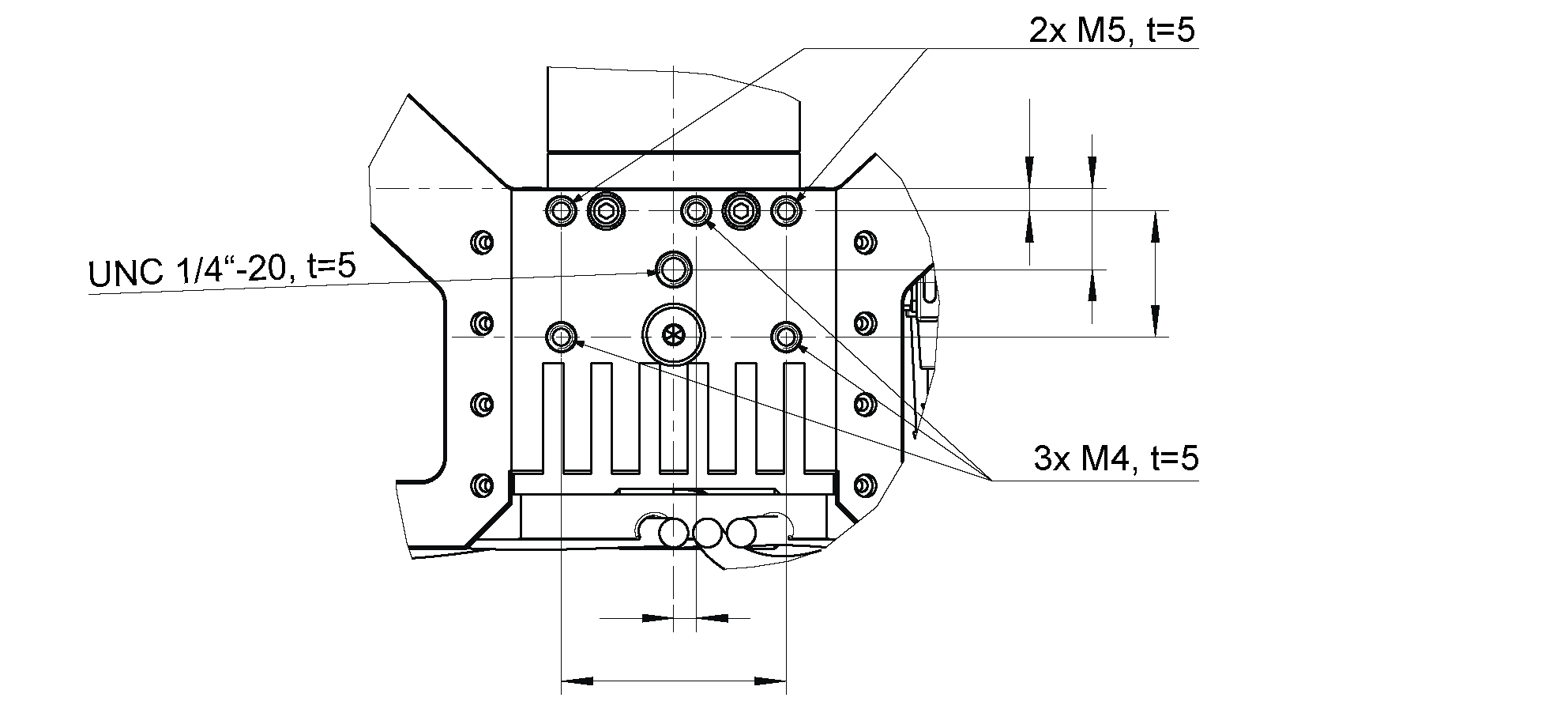
Abb. 7 Montage der rc_viscore Stereokamera
Nur die Fläche, welche die Gewinde enthält, darf mit der Halterung in Berührung kommen, alle anderen Flächen müssen frei bleiben. Hinter der rc_viscore Stereokamera muss ein Freiraum von mindestens 10 cm vorhanden sein, um einen ausreichenden Luftstrom zur Kühlung zu ermöglichen.
Einschalten¶
Bemerkung
Verbinden Sie immer alle M12-Steckverbinder an der rc_viscore Stereokamera und ziehen sie fest bevor Sie die Stromversorgung einschalten.
Nachdem Sie das System an die Stromversorgung angeschlossen haben, sollte die LED auf der Vorderseite der rc_viscore Stereokamera sofort aufleuchten.
Warnung
Schauen Sie während der Inbetriebnahme oder des Betriebs zu keinem Zeitpunkt in das Projektorobjektiv oder in den Lichtstrahl in der Mitte der rc_viscore Stereokamera.
Herstellen der Verbindung¶
Die rc_viscore Stereokamera kann zusammen mit einem rc_cube oder als eigenständige hochauflösende RGBD-Kamera mit dem SGM®producer verwendet werden. Die folgenden Abschnitte beschreiben den Anschluss der rc_viscore Stereokamera in beiden Szenarien.
Verbinden mit dem rc_cube¶
Der rc_cube I (Industrie Edge Computer) bietet vier Netzwerkanschlüsse, die mit Sensor 0-3 bezeichnet sind. Die beiden Netzwerkkabel der rc_viscore Stereokamera müssen direkt an zwei dieser Ports angeschlossen werden. Welche das sind, spielt keine Rolle. Es können zwei Stereokameras gleichzeitig angeschlossen und verwendet werden.
Der rc_cube S (Edge Computer) bietet einen 2,5-Gigabit-Sensoranschluss. Für den Anschluss einer rc_viscore Stereokamera muss ein Switch verwendet werden. Der Switch muss 2,5 Gigabit für den Anschluss an den rc_cube und 1 Gigabit Geschwindigkeit für den Anschluss an die rc_viscore Stereokamera unterstützen. Der Switch ist nicht im Lieferumfang des rc_cube S enthalten. Roboception kann auf Anfrage einen geeigneten Switch empfehlen.
Standardmäßig ist der rc_cube so konfiguriert, dass ein rc_visard als Sensor unterstützt wird. Um eine rc_viscore Stereokamera zu unterstützen, muss der Typ der Kamera-Pipeline in der Web GUI des rc_cube unter geändert werden (siehe https://doc.rc-cube.com/latest/en/pipelines.html). Ein Klick auf Pipelines konfigurieren öffnet einen Dialog, der es erlaubt, den Typ der Pipeline auf rc_viscore zu ändern. Nach der Änderung der Pipeline-Konfiguration ist ein Neustart erforderlich.
Für den gleichzeitigen Anschluss von zwei Stereokameras ist es zusätzlich notwendig, wie oben beschrieben, eine zweite Pipeline zu konfigurieren und durch Setzen eines Filterausdrucks festzulegen, welche Pipeline welche rc_viscore Stereokamera verwenden soll. Dies geschieht durch Anklicken von Kameraverbindung konfigurieren auf der Seite Kamera-Pipelines, oder durch Auswahl der entsprechenden Pipeline im Menü, z.B. unter . Ein Klick auf Kamera auswählen öffnet einen Dialog zum Bearbeiten des Gerätefilters (siehe auch https://doc.rc-cube.com/latest/en/pipelines.html#configuration-of-connected-cameras).
Es kann bis zu einer Minute dauern, bis die rc_viscore Stereokamera verbunden ist. Für jeden erfolgreich verbundenen Sensor wird die Verbindungsgeschwindigkeit und Bildrate im der Web GUI angezeigt.
Anschließen an den SGM®Producer¶
Für die Verwendung der rc_viscore Stereokamera als hochauflösende RGBD-Kamera bietet Roboception den SGM®Producer an, der eine GenICam-kompatible Transportschicht darstellt (siehe https://roboception.com/product/sgmproducer).
Der Producer kann mit Halcon, mit der rc_genicam_api für C++ Programmierer, mit dem rc_genicam_driver für ROS und ROS2, sowie mit jeder anderen GenICam kompatiblen Anwendung verwendet werden. Er kann kostenlos von https://www.roboception.com/download heruntergeladen und auf Windows- und Ubuntu-Computern mit einer Nvidia-Grafikkarte installiert werden.
Es wird dringend empfohlen, beide Netzwerkkabel direkt an 1-Gigabit-Ethernet-Ports des Computers anzuschließen. Wenn ein Netzwerk-Switch verwendet wird, sollte die Netzwerkverbindung zwischen dem Switch und dem Computer eine Bandbreite von mehr als 2 Gigabit haben, z.B. 2,5, 5 oder 10 Gigabit. Andernfalls kann die volle Bildwiederholrate nicht erreicht werden.
In der Standard-Netzwerkkonfiguration und gemäß dem GigE Vision-Standard versuchen die Kameras, ihre Konfiguration von einem DHCP-Server zu beziehen und greifen auf das Link-Local-Selbstkonfigurationsprotokoll zurück, wenn kein DHCP-Server gefunden werden kann. Für eine direkte Verbindung ohne DHCP-Server sollten die Ethernet-Ports des Computers für ein Link-Local-Netzwerk konfiguriert werden. Es ist auch möglich, die IP-Adressen der linken und rechten Kamera manuell zu konfigurieren.
Die Optionen zum Ändern der Netzwerkeinstellungen und der IP-Konfiguration sind:
- jedes Konfigurationstool, das mit GigE Vision 2.0 kompatibel ist, oder das Kommandozeilentool
gc_configvon Roboception. Normalerweise scannen diese Tools nach allen verfügbaren GigE Vision® Geräten im Netzwerk. Alle Geräte vom Typ rc_viscore Stereokamera können eindeutig anhand ihrer Seriennummer identifiziert werden, die auf dem Gerät aufgedruckt ist.- vorübergehende Änderung der Netzwerkkonfiguration über das Tool
rcdiscover-guivon Roboception. Die einzelnen Kameras können in der Liste angezeigt werden, nachdem das Kontrollkästchen Only Roboception devices deaktiviert wurde.
Bemerkung
Das Kommandozeilen-Tool gc_config ist Teil des Open-Source-Convenience-Layers rc_genicam_api von Roboception, der kostenlos für Windows und Linux von https://www.roboception.com/download heruntergeladen werden kann.
Für die Einstellung des Fokus, die Überprüfung der Kalibrierung und die Neukalibrierung der rc_viscore Stereokamera, wie in den nächsten Abschnitten erläutert, enthält das SGM®Producer-Paket ein Kalibrierprogramm, genannt rc_calib, und ein Anzeigeprogramm, genannt rc_viewer.
Kamerafokus einstellen¶
Es wird dringend empfohlen, den Fokus der rc_viscore Stereokamera im tatsächlichen Arbeitsbereich zu überprüfen. Standardmäßig fokussiert Roboception die rc_viscore Stereokamera auf einen Abstand von 1.6 m (falls nicht anders vom Kunden gewünscht), was einem Arbeitsbereich von etwa 1.4-2.0 m entspricht. Falls in der Anwendung ein anderer Arbeitsbereich verwendet wird, muss der Fokus angepasst werden. Bitte beachten Sie, dass der Tiefenschärfebereich aufgrund der hohen Auflösung der Kamera begrenzt ist. Im Nahbereich ist der Tiefenschärfebereich deutlich kleiner als in größerer Entfernung. Daher sollte der Mindestabstand für die Fokussierung so weit entfernt wie für die jeweilige Anwendung sinnvoll gewählt werden.
Wenn die Schärfe eingestellt werden muss, muss der Objektivschutz der linken und rechten Kamera abgenommen werden, wie in Abb. 8 gezeigt.

Abb. 8 Abnehmen des Objektivschutzes zum Fokussieren und Ändern der Blende
Der Fokusring und der Blendenring (Irisring) sind mit jeweils 3 Schrauben gesichert, wie in Abb. 9 gezeigt. Zum Verstellen eines Rings müssen alle drei Schrauben gelöst werden.
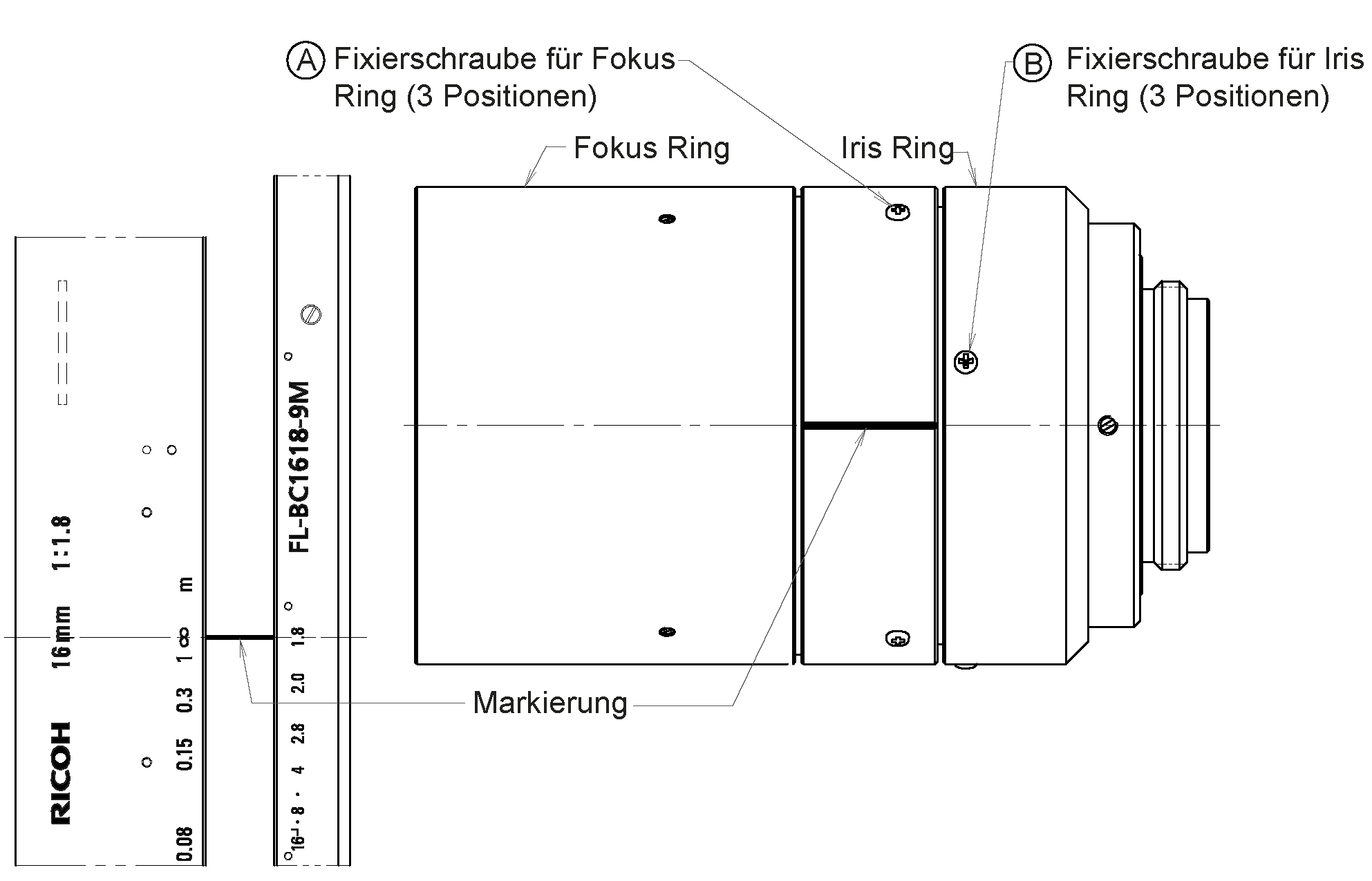
Abb. 9 Lage der Schrauben von Fokus- und Blendenring (Irisring)
Der rc_cube bietet als Teil der Kamerakalibrierung einen Fokus-Helfer in der Web GUI unter . Im ersten Schritt muss die Größe des Kalibriermusters angegeben werden. Mit einem Klick auf Weiter wird der Fokus-Helfer geöffnet. Siehe auch https://doc.rc-cube.com/latest/en/camera_calibration.html.
Im SGM®Producer gibt es einen Fokus-Helfer im Kalibrierprogramm rc_calib, nachdem die rc_viscore Stereokamera unter ausgewählt wurde, und die Größe des Kalibriermusters angegeben wurde.
Die Balken auf der rechten Seite des Bildes zeigen die Unschärfe des Kalibriermusters an. Ein Minimum ist wünschenswert. Siehe auch https://doc.rc-cube.com/latest/en/camera_calibration.html#adjust-focus.
Um die Schärfe richtig einzustellen, sollte das Kalibriermuster in der Mitte des Arbeitsbereichs platziert werden. Dann sollte der Fokusring jeder Kamera gedreht werden, bis der Balken im zugehörigen Bild ein Minimum erreicht. Ein Wert nahe der untersten Teilungslinie ist wünschenswert. Nach der Fokussierung auf diese Weise sollte das Kalibriermuster im minimalen und maximalen Arbeitsabstand platziert werden. Wenn die Unschärfe beim minimalen und maximalen Arbeitsabstand nicht zufriedenstellend ist (z.B. nahe der zweiten Teilungslinie oder höher), kann die Blende durch Drehen des Irisrings etwas geschlossen werden, d.h. eine höhere Blendenzahl gewählt werden, um den Tiefenschärfebereich der Kameras zu erhöhen. Bitte beachten Sie, dass sich dadurch die Belichtungszeit und möglicherweise auch die Verstärkung erhöht, was zu einem stärkeren Rauschen im Bild führt. Die optimale Einstellung ist von der jeweiligen Anwendung abhängig. Die Standard-Blendenzahl der Kameras ist 4.
Warnung
Für die linke und die rechte Kamera muss die gleiche Blendeneinstellung verwendet werden, um eine Verschlechterung der Bildverarbeitungsleistung zu vermeiden. Vergewissern Sie sich, dass das linke und das rechte Bild mit der gleichen Helligkeit angezeigt werden.
Nach der Einstellung von Schärfe und Blende müssen alle Schrauben leicht angezogen und der Objektivschutz wieder aufgesetzt werden.
Warnung
Es ist zwingend erforderlich, die Kalibrierung immer zu überprüfen, nachdem der Fokus oder die Blende der rc_viscore Stereokamera verändert wurden (siehe Kalibrierung).
Bei Fragen zum Arbeitsbereich und zur Fokussierung der rc_viscore Stereokamera wenden Sie sich bitte an den Support.
Projektorfokus einstellen¶
Während der Herstellung der rc_viscore Stereokamera wurde der Fokus des Projektors passend zum Fokusabstand der Kameras eingestellt, welcher standardmäßig 1.6 m beträgt (falls nicht anders vom Kunden gewünscht). Eine perfekte Fokussierung des Projektors ist nicht nötig. Ein leicht unscharfes Projektionsmuster beeinträchtigt das Tiefenbild nicht.
Um die Schärfe des Projektionsmusters beurteilen zu können, sollte der Projektor dauerhaft eingeschaltet werden, indem in der rc_cube Web GUI unter oder der Out1 / Projektor Modus auf High gesetzt wird.
Der Projektorfokus muss nur angepasst werden, wenn das Projektionsmuster sehr unscharf ist. In diesem Fall, lösen Sie die drei kleinen Kreuzschlitzschrauben am Fokusring des Projektorobjektivs, wie in Abb. 9 gezeigt. Dann drehen Sie den Ring bis das sichtbare Projektionsmuster scharf wird. Danach ziehen Sie die Schrauben wieder leicht an.
Projektorblende einstellen¶
Die Blende des Projektors beeinflusst die Helligkeit des Projektionsmuster. Standardmäßig ist die Blende des Projektors vollständig geöffnet, d.h. der Projektor hat die maximale Helligkeit. Die Blende sollte so eingestellt werden, dass der Helligkeitsunterschied zwischen Bildern, die mit Projektor aufgenommen werden, und Bildern ohne Projektor nicht zu groß ist, aber dass das Projektionsmuster trotzdem noch sichtbar ist in den Bildern, die mit Projektor aufgenommen werden. Um die korrekte Einstellung zu finden, stellen Sie sicher, dass die externe Beleuchtung im Arbeitsbereich der zu erwartenden Beleuchtung während des Betriebs entspricht, und dass die rc_viscore Stereokamera im gewünschten Abstand von der Szene montiert ist.
Danach setzen Sie in der rc_cube Web GUI unter , den Modus Belichtung auf Auto und stellen Sie den Modus Belichtungsautomatik auf AdaptiveOut1. Weiterhin setzen Sie unter IOControl Einstellungen den Modus Out1 / Projektor auf ExposureAlternateActive, damit jedes zweite Bild mit Projektionsmuster aufgenommen wird. Jetzt wird in der Textzeile unter den Livebildern der Wert Out1 Reduktion in Prozent angezeigt.
Der Wert Out1 Reduktion beschreibt die Reduktion der Helligkeit des Bildes ohne Projektion verglichen mit der Helligkeit des Bildes mit Projektion. Der Wert sollte zwischen 10% und 20% liegen. Eine höhere Out1 Reduktion bedeutet, dass der Projektor zu hell ist im Vergleich zu der externen Beleuchtung, was dazu führt, dass Bilder ohne Projektionsmuster zu dunkel sind. Deswegen sollte die externe Beleuchtung erhöht werden, z.B. durch Anbringen einer zusätzlichen Lichtquelle, oder die Helligkeit des Projektors sollte durch leichtes Schließen der Blende verringert wird. Wenn die Out1 Reduktion zu niedrig ist, ist der Projektor nicht hell genug im Vergleich zum Umgebungslicht, was bedeutet, dass das Projektionsmuster in den Kamerabildern kaum sichtbar ist, und somit die Tiefenbildberechnung nicht verbessern kann. Also sollte das Umgebungslicht reduziert werden, oder die Helligkeit des Projektors sollte durch Öffnen der Blende erhöht werden.
Zum Anpassen der Projektorblende, lösen Sie die drei kleinen Kreuzschlitzschrauben am Irisring des Projektorobjektivs, wie in Abb. 9 gezeigt. Dann drehen Sie den Irisring bis der Wert für die Out1 Reduktion zwischen 10% und 20% liegt.
Danach sollte das dunkelste Objekt, das in der Anwendung vorkommen kann, im Arbeitsbereich der Kamera platziert werden. Wenn dieses Objekt im Tiefenbild nicht gut sichtbar ist, sollte die Helligkeit des Projektors weiter erhöht werden, auch wenn die Out1 Reduktion bereits hoch ist.
Am Ende ziehen Sie die Schrauben wieder leicht an.
Bei Fragen zum Anpassen des Projektors der rc_viscore Stereokamera wenden Sie sich bitte an den Support.
Kalibrierung¶
Nach der Überprüfung und eventuellen Einstellung der Schärfe der Kameras ist der nächste Schritt die Überprüfung der Kamerakalibrierung. Dieser Schritt sollte niemals übersprungen werden und ist im Gegensatz zu allen rc_visard-Produkten obligatorisch. Bitte beachten Sie, dass der Arbeitsbereich der rc_viscore Stereokamera vordefiniert ist und die Kalibrierung für den minimalen und maximalen Arbeitsabstand überprüft werden sollte. Bei Fragen zum Arbeitsbereich und zur Kalibrierung der rc_viscore Stereokamera wenden Sie sich bitte an den Support.
Das Handbuch des rc_cube erklärt die Überprüfung und Neukalibrierung im Detail (siehe https://doc.rc-cube.com/latest/en/camera_calibration.html#verify-calibration). Das dort beschriebene Verfahren kann auf die gleiche Weise auf den SGM®Producer angewandt werden, indem das mit dem Producer mitgelieferte Programm rc_calib verwendet wird.
Warnung
Es ist zwingend erforderlich, die Kalibrierung immer zu überprüfen, nachdem die rc_viscore Stereokamera montiert, der Fokus oder die Blende verändert wurde.
Eine Neukalibrierung ist nur nötig, wenn der angezeigte Kalibrierfehler 0.3 Pixel übersteigt. Nach einer Neukalibrierung ist auch eine neue Hand-Auge Kalibrierung nötig.
Bemerkung
Die rc_viscore Stereokamera wird von Roboception mit voreingestelltem Fokus geliefert, um sicherzustellen, dass sie im gewünschten Tiefenbereich funktioniert. Bitte wenden Sie sich an den Support und teilen Sie uns Ihre Spezifikationen mit, damit wir die rc_viscore Stereokamera entsprechend einrichten können. Eine Kalibrierungsprüfung vor Ort ist dennoch erforderlich, um sicherzustellen, dass bei der Lieferung oder Montage keine Probleme aufgetreten sind.